Comments on Moving average that uses less memory?
Parent
Moving average that uses less memory?
My control system gets a signal representing the plant output, but that signal has a lot of noise on it. The control system goes nuts trying to react to the noise. I need to filter out the noise somehow, but preserve the basic plant response. I heard about a moving average and tried it. It helps, but uses up a lot of memory in my small microcontroller. It also introduces some lag.
Is there a way to get rid of the noise, use less memory, and maybe have less lag too?
You can't eliminate all noise, use no memory, no processing cycles, and not add some lag. However, you can do much bet …
6mo ago
I'm adding this as a corollary to Olin's post, in case an exact formula for attenuation is needed. That basic IIR is …
4y ago
I'm adding to Olin's answer with a little bit of theory (from the standpoint of an EE) and I'm also showing a 2nd order …
5y ago
A bit of a tangent, but in mcu firmwares, higher order filters can also be implemented directly with biquad sections. Mo …
4y ago
I would suggest finding the root cause of all the noise and eliminate as much of it at the source. Baluns, active gua …
6mo ago
Post
I'm adding this as a corollary to Olin's post, in case an exact formula for attenuation is needed.
That basic IIR is derived from the exponential moving average, and its impulse response is:
$$h[n]=\alpha x[n]+(1-\alpha)x[n-1]$$
which translates into this transfer function:
$$H(z)=\frac{\alpha}{1-(1-\alpha)z^{-1}}$$
This can be used to determine analytically the attenuation at a particular frequency, by simply substituting $z^{-1}=\text{e}^{-j\Omega}$:
\begin{align*} H(j\Omega)=\frac{\alpha}{1-(1-\alpha)\text{e}^{-j\Omega}} \\ |H(j\Omega)|=\frac{\alpha}{\sqrt{2(\alpha-1)(\cos(\Omega)-1)+\alpha^2)}}\tag{1} \end{align*}
The -3 dB point can also be calculated from $(1)$:
\begin{align*}|H(\Omega)|^2=\frac12=\frac{\alpha^2}{2(\alpha-1)(\cos(\Omega)-1)+\alpha^2}\quad\Rightarrow \\ 2(\alpha-1)(\cos(\Omega)-1)+\alpha^2=2\alpha^2\quad\Rightarrow \\ \cos(\Omega)-1=\frac{\alpha^2}{2(\alpha-1)}\quad\Rightarrow \\ \Omega=\arccos\left(1+\frac{\alpha^2}{2(\alpha-1)}\right)\end{align*}
This can be easily tested with any simulator. As an example, for $\alpha=0.4$, the attenuation at $0.37\frac{f_s}{2}$ and the -3 dB point are:
\begin{align*} |H(0.37\pi)|=\frac{0.4}{\sqrt(2(0.4-1)(\cos(0.37\pi)-1)+0.4^2)}=0.4255746548210215 \\ f=\frac{1}{\pi}\arccos\left(\frac{0.4^2}{2(0.4-1)}+1\right)=0.1662579714811903 \end{align*}
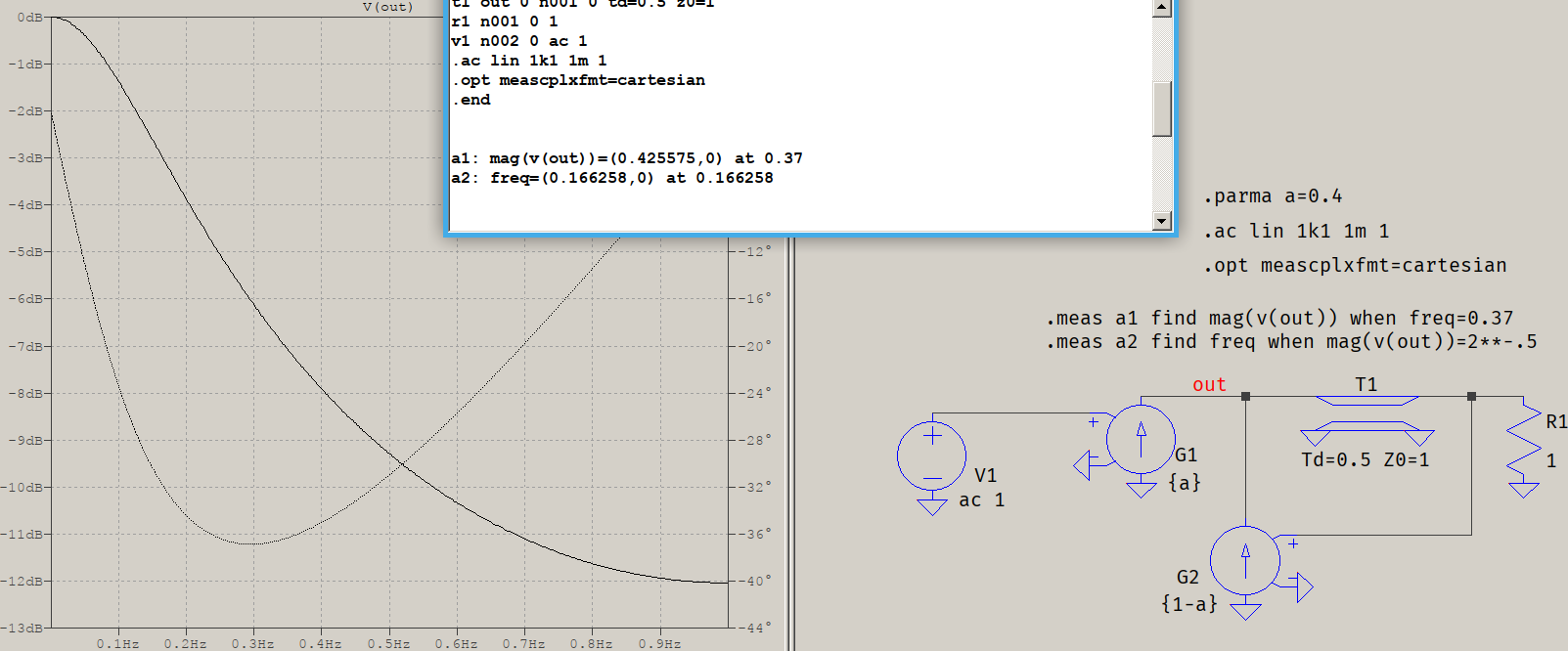
(where I used a normalized [0...Nyquist])

0 comment threads